La Sección 2 proporciona material de referencia y una descripción general de las técnicas de alimentación en redes submarinas. En la Sección 3 se presenta la arquitectura del sistema propuesta y su principio de funcionamiento. En la Sección 4 describimos los principios físicos subyacentes de la atenuación de ondas y campos en los casos de ondas electromagnéticas (EM), inducción magnética (IM) y ultrasonido (US) en agua dulce y de mar. En la Sección 5 describimos el diseño y las métricas de evaluación de nuestro sistema TIP habilitado con capacidades de comunicación ultrasónica. El prototipo del sistema y los resultados experimentales se ilustran en la Sección 6 y la Sección 7, respectivamente, Conclusiones en la seccion 8
Aportes
Presenta el diseño del primer nodo sensor submarino sin batería que puede recargarse de forma inalámbrica mediante ondas ultrasónicas desde distancias más largas que las permitidas por las tecnologías actuales.Arquitectura de una plataforma equipada con conectividad ultrasónica para
IoUT que se puede cargar de forma remota mediante ondas acústicas,
eliminando la necesidad de baterías de gran tamañoun sistema que utiliza un solo transductor tanto para carga como para
comunicación
Materiales utilizados
Una placa Teensy
Un MOSFET/ADC
Radio definido por software USRP N210, equipado con placas hijas LFTX y LFRX
Módem submarino definido por software Amplificador de alta potencia LZY-22+
Transductor Airmar P58
Diodos BAT54Teoría
El uso de supercondensadores, que sustituyen a las baterías tradicionales o recargables, hace que el sistema sea más ligero, más fácil y más rápido de recargar o celdas
secundarias.Los materiales piezoeléctricos se utilizan para extraer energía de
fuentes de energía cinética. Fig. 2. Esquematización de las técnicas de alimentación bajo el agua. [1]
Fig. 2. Esquematización de las técnicas de alimentación bajo el agua. [1]
 TABLA 1 Comparación entre técnicas TIP bajo el agua.
TABLA 1 Comparación entre técnicas TIP bajo el agua.
Fig. 2. Esquematización de las técnicas de alimentación bajo el agua. [1]TABLA 1 Comparación entre técnicas TIP bajo el agua. Alternativas energeticas:os nanogeneradores triboeléctricos (TENG), Las pilas de combustible microbianas (MFC), Las turbinas y los rotoresLos acopladores electromagnéticos análisis cuantitativo de las pérdidas de transmisión para diferentes tipos de ondas . Modelos de propagación EM en agua
Modelo 1:Propagación EM en agua dulce
Modelo 2: Propagación EM en agua de mar Modelos de inducción magnética de campo cercano en agua.Sistema basado en inducción magnética (IM)
Topología
El sistema incluye un nodo SEANet, que sirve como plataforma de detección y comunicación submarina, una unidad de gestión de energía para recibir, convertir y almacenar la energía y una unidad de potencia para alimentar los componentes de la plataforma. El componente central de la unidad de comunicación es una placa Teensy que es un sistema de desarrollo de microcontroladores que recibe y procesa los datos de un sensor. Tambien genera señales de datos basado en el esquema de comunicación de multiplexación por división de frecuencia ortogonal con relleno cero (ZP-OFDM) Fig. 3. Diagrama de bloques de la plataforma IoT recargable por ultrasonidos. [1]
Fig. 3. Diagrama de bloques de la plataforma IoT recargable por ultrasonidos. [1]
Inicialmente, el buffer de energía se agota total o parcialmente agotado. un cargador remoto debe enviar energía al sistema a través de ondas ultrasónicas para que el nodo pueda ser recargado.La segunda fase a energía se utiliza para alimenta el nodo SEANet para detección y transmisión de datos Unidad de Comunicación SEANet Un filtro de paso alto (HPF) conecta el Teensy con un mezclador y elimina el desplazamiento de CC de las formas de onda. un rectificador de onda completa dediodo tradicional conectado al transductor a través de una red de adaptación. combinación entre el transductor y el rectificador.
Fig. 3. Diagrama de bloques de la plataforma IoT recargable por ultrasonidos. [1]El rectificador extrae un voltaje constante que se utiliza para recargar el almacenamiento de energía, que necesita una señal de CC para recargarse
. El sistema comprende dos interruptores basados en MOSFET/ADC que conectan el transductor a la unidad de gestión de energía y permiten alimentar la unidad de comunicación de datos y activar la transmisión una vez que se ha almacenado suficiente energía.utiliza un banco de supercondensadores que se conectan en paralelo durante la fase de carga y en una configuración diferente durante la fase de alimentación para que el voltaje a través de la configuración de capacitor equivalente cumple con los requisitos de potencia de carga. Fig. 10. Ilustración esquemática del banco de pruebas utilizado para demostrar la TIP ultrasónica en agua y la alimentación del nodo SEANet G1. [1]La plataforma IoUT incluye una unidad de gestión de energía, una unidad de alimentación y un nodo sensor submarino SEANet G1 basado en el modelo arquitectónico
Fig. 10. Ilustración esquemática del banco de pruebas utilizado para demostrar la TIP ultrasónica en agua y la alimentación del nodo SEANet G1. [1]La plataforma IoUT incluye una unidad de gestión de energía, una unidad de alimentación y un nodo sensor submarino SEANet G1 basado en el modelo arquitectónico
La estación de carga que transmite energía al nodo sumergido está compuesta por tres elementos principales: un minicircuito software universal basado en periféricos de radio (USRP), módem submarino definido por software Amplificador de alta potencia LZY-22+ y transductor Airmar P58
o GNU Radio para generar muestras de banda base.El nodo IoUT sumergido incorpora una red coincidente basada en un circuito de elementos concentrados pasivos para limitar la fuga de señal y los reflejos entre el modo.cargamos un conjunto de supercondensadores y registramos el tiempo para cargar el almacenamiento con diferentes cantidades de potencia transmitida.
Fig. 10. Ilustración esquemática del banco de pruebas utilizado para demostrar la TIP ultrasónica en agua y la alimentación del nodo SEANet G1. [1]La estación de carga que transmite energía al nodo sumergido está compuesta por tres elementos principales: un minicircuito software universal basado en periféricos de radio (USRP), módem submarino definido por software Amplificador de alta potencia LZY-22+ y transductor Airmar P58
o GNU Radio para generar muestras de banda base.
Parámetros
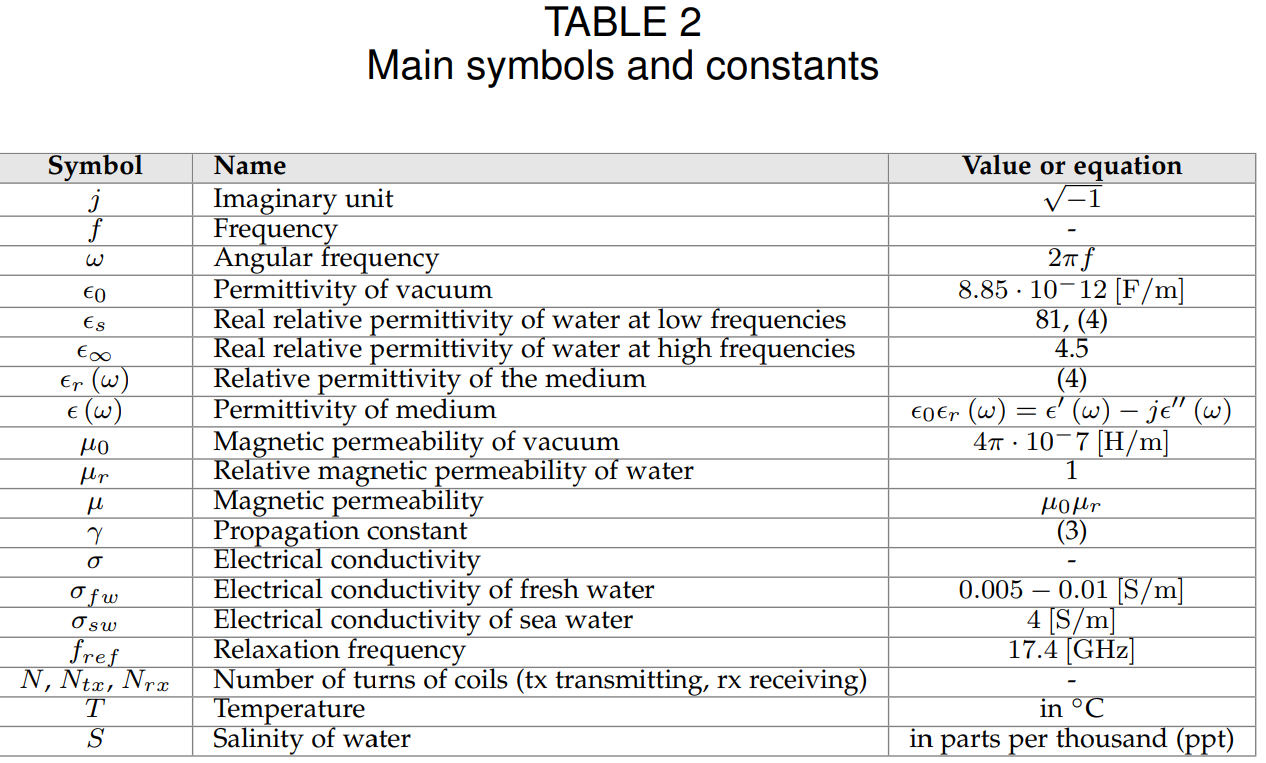 TABLA 2 Principales símbolos y constantes.
TABLA 2 Principales símbolos y constantes.Técnicas mencionadas
Aplicaciones mencionadas
Aplicaciones militares, comerciales y científicas,
incluida (i) vigilancia táctica/costera; (ii) sistemas de control y seguimiento
de la industria del petróleo y el gas; (iii) monitoreo del cambio climático,
control y seguimiento de la contaminación; y (iv) explotación comercial del
medio acuático
Alimentación de dispositivos electrónicos en aguas profundass .Objetos submarinos (por ejemplo, nodos de redes de
sensores inalámbricos submarinos (UWSN) y vehículos submarinos
autónomos (AUV)) vehículos operados remotamente (ROV) o vehículos submarinos no
tripulados (UUV)
Bibliografía
R. Guida, E. Demirors, N. Dave, and
T. Melodia, “Underwater Ultrasonic Wireless Power Transfer: A Battery-Less
Platform for the Internet of Underwater Things,” IEEE Trans Mob Comput,
vol. 21, no. 5, pp. 1861–1873, May 2022, doi: 10.1109/TMC.2020.3029679.
No hay comentarios.:
Publicar un comentario