 Diagrama lógico de control de un sistema de carga inalámbrica subacuática como referencia
Diagrama lógico de control de un sistema de carga inalámbrica subacuática como referenciaLas diferencias en los parámetros entre los medios de transmisión TIP se encuentran
principalmente en la conductividad, la permitividad relativa, la salinidad relativa y la permeabilidad
relativa. Esto afectará la frecuencia operativa óptima, las características de salida y el estado operativo
del sistema [1]
 Descripción general de los efectos de los medios de agua de mar en la transferencia de energía inalámbrica bajo el agua.
Descripción general de los efectos de los medios de agua de mar en la transferencia de energía inalámbrica bajo el agua.
Tiene las incomparables ventajas técnicas del reemplazo de
batería tradicional o de los conectores húmedos, que pueden mejorar efectivamente la seguridad, la conveniencia y la ocultación de la carga bajo el
agua [1]
los equipos
submarinos no tripulados (UUE) se han convertido en un punto de investigación en el
campo de la ingeniería marina . la tecnología TIP se ha expandido cada vez más al medio de agua de mar debido al avance y la gran demanda [47][48].
Los resultados experimentales muestran que a frecuencias superiores a 100 kHz, el agua de mar
comienza a afectar negativamente la resistencia y el rendimiento del acoplador. Sin embargo, el nivel
de potencia del sistema era relativamente bajo y no excedía los 100 W [1]
propio del medio
dan pérdidas de energía adicionales a una frecuencia de
funcionamiento más alta y alteran las propiedades del sistema UWP
corrientes parásitas en el medio de agua de mar.
Usos
vehículo submarino autónomo (AUV) [6,7], el
vehículo operado a distancia (ROV) [8,9], el planeador submarino autónomo (AUG)
[10,11] y la boya sumergida [12][13]
ROV es el vehículo cableado utilizado para observación, inspección y construcción
submarina [14] . El cable entre el ROV y la nave nodriza sirve como canal de transmisión de
energía eléctrica e información, mientras que su alcance operativo y autonomía están
limitados [15][16] Con el desarrollo de la tecnología de ingeniería oceánica, se ha creado una especie de ROV
inalámbrico para liberarse de estas limitaciones [17][18]
AUG es una categoría de nuevos vehículos submarinos no tripulados [1]
En el ámbito civil, los AUV se pueden utilizar para la investigación y construcción
del fondo marino, la recopilación de datos y el apoyo a la perforación [71][72]
La boya sumergida es un dispositivo de seguimiento marino típico que se puede utilizar para medir información hidrológica y meteorológica [66][67]
 Redes inalámbricas de transferencia de energía y suministro de energía para futuros dispositivos submarinos no tripulados.
Redes inalámbricas de transferencia de energía y suministro de energía para futuros dispositivos submarinos no tripulados.Problemas
La tecnología UWPT encuentra
problemas con la atenuación de las ondas electromagnética [49][50]
La interferencia
irregular de las corrientes de agua de mar [51]
el acoplamiento de precisión bajo el
agua [52]
Existen diferentes especificaciones de sistemas UWPT sin un estándar claro hasta
el momento para cumplir con los requisitos de suministro de energía de diferentes
diámetros, modelos y niveles de potencia de los UUV [1]
debido a la influencia de la conductividad y
la permitividad relativa del medio de agua de mar, es difícil medir con precisión la
impedancia portuaria del sistema UWPT, , y la medición de la inductancia mutua también
se verá afectada por el efecto piezomagnético del agua de mar a diferentes profundidades [1]
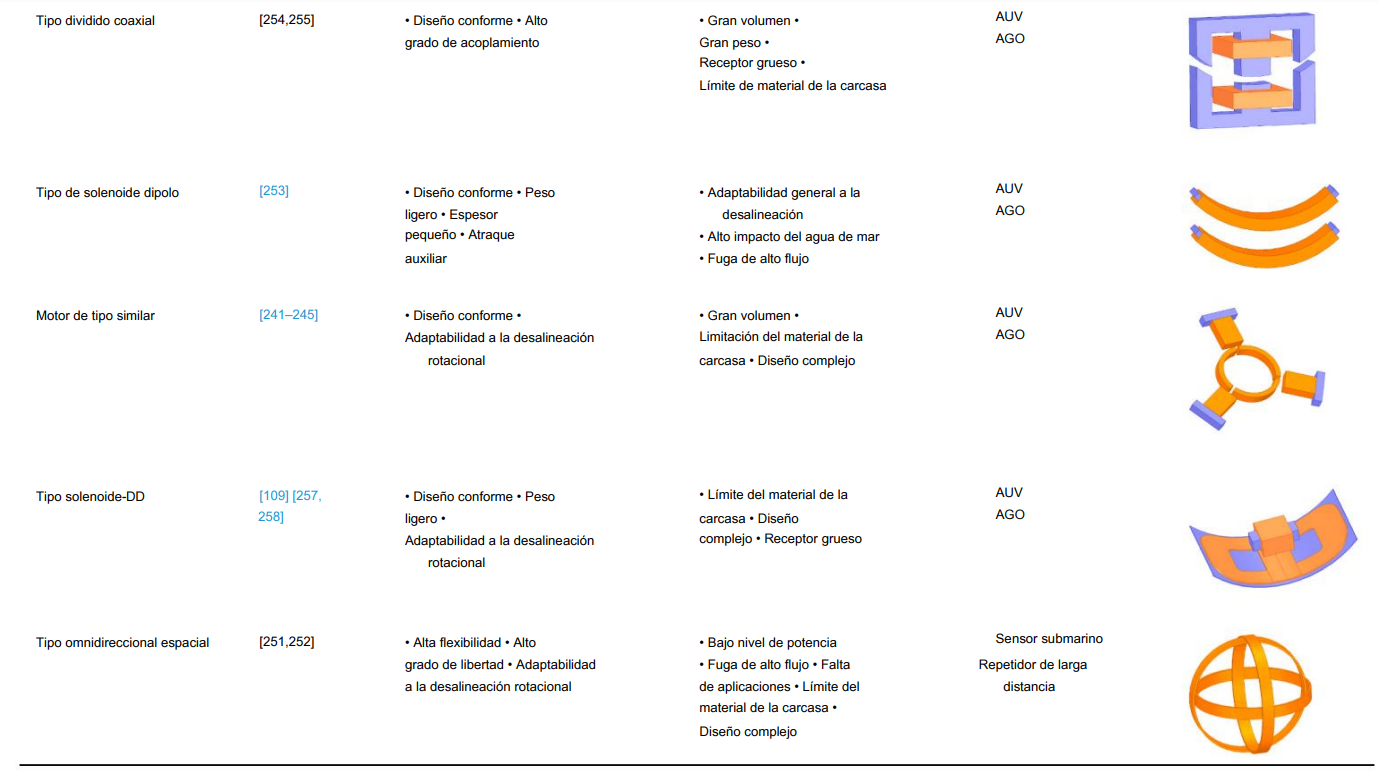
Formas de atraque, tipos de acopladores magnéticos y escenarios de aplicación de equipos submarinos autónomos.

Boya sumergida y componentes del sistema UWPT [1]
Un transductor fotovoltaico convierte la energía solar en energía
eléctrica para alimentar el sensor submarino a través de un cable de amarre. Las
primeras UWPT de las que se tiene noticia utilizaban un acoplador magnético de
tipo cable de anillo, que extraía energía eléctrica del cable de amarre sin contacto [1]
Las
primeras UWPT de las que se tiene noticia utilizaban un acoplador magnético de
tipo cable de anillo, que extraía energía eléctrica del cable de amarre sin contacto [1]
El acoplador magnético tipo cable de anillo tiene alta flexibilidad y capacidad
de expansión en cascada. Los receptores suelen construirse con núcleos
desmontables para una instalación fácil y rápida, y el número de acopladores está
limitado únicamente por la longitud física del bucle y la capacidad del convertidor
de fuente, propuso el acoplador
magnético de tipo de cable de anillo de entrada única y salida múltiple (SIMO) para
escenarios de carga múltiple. intentó aplicar el acoplador
magnético de cable en anillo a las aplicaciones AUV, sin embargo, se informó que
la eficiencia del sistema era inferior al 9 % debido a las pérdidas por corrientes
parásitas causadas por la fuga de flujo..
se han propuesto tipos de acopladores magnéticos
planos y coaxiales integrados con circuitos magnéticos relativamente
cerrados [1]
Wireless For Subsea (WFS) lanzó un conector comercial húmedo sin contacto “Seatooth Connect” en 2015[1]
El acoplador magnético adoptó un par
de bobinas circulares planas simétricas, que pueden soportar la transferencia de
energía de 50 W a 3 kW. Se informó que el producto WFS había proporcionado 50
W de potencia con una eficiencia del 80 % en el planeador ROUGHIE[1]
propuso un acoplador magnético plano con bobinas circulares y núcleos en
forma de cruz para lograr una transmisión MIMO con una eficiencia del sistema de
hasta el 70,5 %[1]
La forma más sencilla de obtener energía eléctrica
es utilizar un acoplador magnético de tipo cable de anillo directamente en el cable
de amarreo, para generar un campo electromagnético intenso, el
sistema debe funcionar a altas frecuencias. eN una
sola vuelta del bucle principal del cable de amarre, las líneas laterales primarias
sufren importantes pérdidas de energía debido a las altas corrientes
utilizar acopladores magnéticos de tipo conector que
funcionen en condiciones de campo cercano relativamente cerradas. El tipo
integrado plano o coaxial tiene un mayor grado de acoplamiento, lo que resulta en
una mayor potencia transmitida y eficiencia. El estado de
acoplamiento de este método es muy susceptible a los cambios de posición
o El
acoplador magnético plano es el acoplador magnético más simple para sistemas
UWPT en términos de estructura y normalmente puede consistir en bobinas planas y
núcleos magnéticos planos correspondientes [1]
Más interesante aún, se ha propuesto un nuevo acoplador magnético UWPT de
simetría rotacional similar a un moto
se ha propuesto un acoplador magnético tridimensional Carcasas fabricadas con materiales no metálicos.
omnidireccion
. El acoplador magnético omnidireccional espacial
podría diseñarse generalmente como dos o tres bobinas ortogonales que se
cruzan y se desacoplan entre sí para formar diferentes rutas espaciales de transmisión
de energía inalámbrica
acoplador magnético dividido coaxial
construido usando un par de núcleos en forma de E, con bobinas solenoides simétricas
enrolladas en el brazo medio de los núcleo
lano curvo
Tabla 12
Clasificación de acopladores magnéticos de sistemas UWP
 Comparación de métodos analíticos para la pérdida por corrientes parásitas en agua de mar.
Comparación de métodos analíticos para la pérdida por corrientes parásitas en agua de mar.
Parámetros detallados de la investigación típica de características de frecuencia
todavía no se han extraído conclusiones
científicas sólidas sobre la cuestión del impacto de la radiación electromagnética en el
medio marino y la vida marina.
Bibliografia
[1] D. Wang, J. Zhang, S. Cui, Z. Bie, F. Chen, and C. Zhu, “The state-of-the-arts of underwater wireless power transfer: A comprehensive review and new perspectives,” Renewable and Sustainable Energy Reviews, vol. 189. Elsevier Ltd, Jan. 01, 2024. doi: 10.1016/j.rser.2023.113910.
[2] Jung H, Subban CV, McTigue JD, Martinez JJ, Copping AE, Osorio J, et al.
Extracting energy from ocean thermal and salinity gradients to power unmanned
underwater vehicles: state of the art, current limitations, and future outlook.
Renew Sustain Energy Rev 2022;160:112283.
[3] Petillot YR, Antonelli G, Casalino G, Ferreira F. Underwater robots: from remotely
operated vehicles to intervention-autonomous underwater vehicles. IEEE Robot
Autom Mag 2019;26:94–101. https://doi.org/10.1109/MRA.2019.2908063.
[4] Atyabi A, MahmoudZadeh S, Nefti-Meziani S. Current advancements on
autonomous mission planning and management systems: an AUV and UAV
perspective. Annu Rev Control 2018;46:196–215. https://doi.org/10.1016/j.
arcontrol.2018.07.002.
[5] As S, Dhongdi SC. Review of underwater mobile sensor network for ocean
phenomena monitoring. J Netw Comput Appl 2022;205:103418. https://doi.org/
10.1016/j.jnca.2022.103418
[6] Paull L, Saeedi S, Seto M, Li H. AUV navigation and localization: a review. IEEE J
Ocean Eng 2014;39:131–49. https://doi.org/10.1109/JOE.2013.2278891.
[7] Di Ciaccio F, Troisi S. Monitoring marine environments with Autonomous
Underwater Vehicles: a bibliometric analysis. Results in Engin. 2021;9:100205.
https://doi.org/10.1016/j.rineng.2021.100205.
[8] Macreadie PI, McLean DL, Thomson PG, Partridge JC, Jones DOB, Gates AR, et al.
Eyes in the sea: unlocking the mysteries of the ocean using industrial, remotely
operated vehicles (ROVs). Sci Total Environ 2018;634:1077–91. https://doi.org/
10.1016/j.scitotenv.2018.04.049.
[9] Meinecke G, Ratmeyer V, Renken J. HYBRID-ROV - development of a new
underwater vehicle for high-risk areas. OCEANS’11 MTS/IEEE KONA; 2011.
p. 1–6. https://doi.org/10.23919/OCEANS.2011.6106913.
[10] Liblik T, Karstensen J, Testor P, Alenius P, Hayes D, Ruiz S, et al. Potential for an
underwater glider component as part of the global ocean observing system.
Methods in Oceanography 2016;17:50–82. https://doi.org/10.1016/j.
mio.2016.05.001.
[11] Webb DC, Simonetti PJ, Jones CP. SLOCUM: an underwater glider propelled by
environmental energy. IEEE J Ocean Eng 2001;26:447–52. https://doi.org/
10.1109/48.972077.
[12] Majidian H, Wang L, Enshaei H. Part. A: a review of the real-time sea-state
estimation, using wave buoy analogy. Ocean Eng 2022:111684. https://doi.org/
10.1016/j.oceaneng.2022.111684.
[13] Curtin TB, Bellingham JG, Catipovic J, Webb D. Autonomous oceanographic
sampling networks. Oceanography 1993;6:86–94. https://doi.org/10.5670/
oceanog.1993.03.
[14] ] Christ RD, Wernli Sr RL. The ROV manual: a user guide for remotely operated vehicles. Butterworth-Heinemann; 2013.
[15] Capocci R, Dooly G, Omerdi´c E, Coleman J, Newe T, Toal D. Inspection-class
remotely operated vehicles—a review. J Mar Sci Eng 2017;5:13. https://doi.org/
10.3390/jmse5010013.
[16] Council NR. Undersea vehicles and national needs. National Academies Press;
1996
[17] Aoki T, Tsukioka S, Kasutani Y, Nakae T, Terakubo S. Development of expendable
optical fiber cable ROV system. OnePetro: The Third International Offshore and
Polar Engineering Conference; 1993.
[18] Ochi H, Watanabe Y, Shimura T. An experiment of the underwater acoustic data
transmission in deep sea. Oceans’ 04 MTS/IEEE Techno-Ocean’04 (IEEE Cat. No.
04CH37600) 2004;1:20–5. https://doi.org/10.1109/OCEANS.2004.1402889.
[47] Yan Z, Song B, Zhang Y, Zhang K, Mao Z, Hu Y. A rotation-free wireless power
transfer system with stable output power and efficiency for autonomous
underwater vehicles. IEEE Trans Power Electron 2018;34:4005–8. https://doi.
org/10.1109/TPEL.2018.2871316.
[48] Kim S-M, Choi J, Jung H. Experimental demonstration of underwater optical
wireless power transfer using a laser diode. Chin Opt Lett 2018;16:080101.
https://doi.org/10.1364/COL.16.080101.
[49] Park D, Chung WK, Kim J. Analysis of electromagnetic waves attenuation for
underwater localization in structured environments. Int J Control Autom Syst
2020;18:575–86. https://doi.org/10.1007/s12555-019-0548-9.
[50] Kwak K, Park D, Chung WK, Kim J. Underwater 3-D spatial attenuation
characteristics of electromagnetic waves with omnidirectional antenna. IEEE
ASME Trans Mechatron 2016;21:1409–19. https://doi.org/10.1109/
TMECH.2015.2509466
[51] Lin R, Li D, Zhang T, Lin M. A non-contact docking system for charging and
recovering autonomous underwater vehicle. J Mar Sci Technol 2019;24:902–16.
https://doi.org/10.1007/s00773-018-0595-6.
[52] Vu MT, Choi H-S, Nhat TQM, Nguyen ND, Lee S-D, Le T-H, et al. Docking
assessment algorithm for autonomous underwater vehicles. Appl Ocean Res 2020;
100:102180. https://doi.org/10.1016/j.apor.2020.102180.
[66] Palm J, Eskilsson C. Mooring systems with submerged buoys: influence of buoy
geometry and modelling fidelity. Appl Ocean Res 2020;102:102302. https://doi.
org/10.1016/j.apor.2020.102302.
[67] Song D, Sun J, Xue B, Jiang Q, Wu B. Mooring system of ocean turbulence
observation based on submerged buoy. China Ocean Eng 2013;27:369–78.
https://doi.org/10.1007/s13344-013-0032-x.
[71] Inzartsev A, Pavin A. AUV application for inspection of underwater
communications. Underwater Vehicles 2009. https://doi.org/10.5772/6704.
[72] Inzartsev A. Underwater vehicles. BoD–Books on Demand; 2009






No hay comentarios.:
Publicar un comentario