Mension La transferencia simultánea de energía e información de ondas de luz (SLIPT)
Mension problemas , a escasez de espectro de RF, la recolección de energía de RF adolece de una eficiencia relativamente baja y de importantes problemas técnicos relacionados con los circuitos de transmisión y recepción
Ventaja en el RF: la tecnología inalámbrica óptica de licencia gratuita
proporcionamos una descripción general de las diversas técnicas SLIPT en los dominios del tiempo, el poder y el espacio
s dos escenarios SLPIT a través de canales submarinos.
la comunicación inalámbrica óptica submarina (UWOC)
Desafíos de hardware, aumentar la velocidad de transmisión de los enlaces de comunicación óptico, stá limitado por el ancho de banda de decodificación de la célula solar, principalmente para configuraciones SLIPT de conmutación horaria
Efectos de propagación ,la intensidad de un haz de luz decae exponencialmente a lo largo de la dirección de propagación , razones de la refracción del agua
Las pérdidas debidas a la divergencia del haz se pueden indicar como atenuación geométrica, que aumenta con la distancia de propagación y está relacionada con la fuente láser o LED utilizada en el transmisor
La ruta de propagación obstruida es otro factor limitante para el SLIPT submarino
ecopilamos datos utilizando el sensor de temperatura autoalimentado. En el
Materiales
Usos mensionados
las baterías de dispositivos de Internet de las cosas (IoT) e Internet de las cosas submarinas (IoUT), vehículo submarino autónomo (AUV)
Parámetros
Las frecuencias típicas asociadas con este tipo de comunicación son de 10 Hz a 1 MHzEl receptor, una plataforma sensora autoalimentada formada por una célula solar de 55 × 70 mm ancho de banda de 3 dB de 30 KHz en modo fotovoltaico. La carga completa de la batería del
módulo de 840 mW tarda aproximadamente 124 minutos utilizando el
láser azul y el rendimiento alcanzado cuando el panel solar actúa como
receptor de información es igual a 500 kbit/500 Kbit/s a través de un enlace submarino de 1,5 m.
Funcionamiento

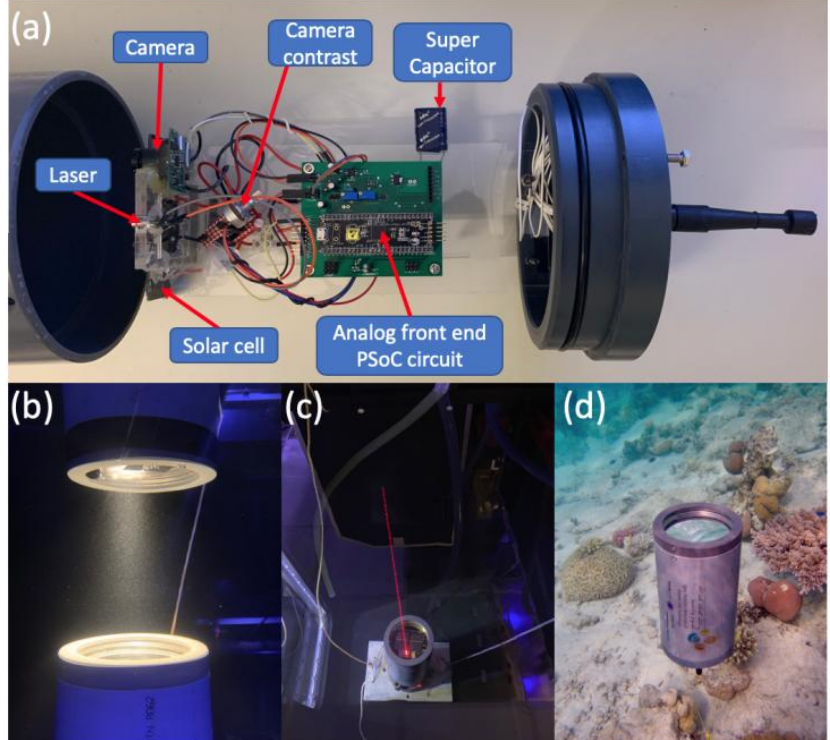 (a) Cámara submarina autoalimentada. Fotografía del módulo (b) siendo
cargado por una fuente LED, (c) transmitiendo información (transmisión de video)
con un láser rojo y (d) desplegado en un arrecife de coral en el Mar Rojo.
(a) Cámara submarina autoalimentada. Fotografía del módulo (b) siendo
cargado por una fuente LED, (c) transmitiendo información (transmisión de video)
con un láser rojo y (d) desplegado en un arrecife de coral en el Mar Rojo.
No hay comentarios.:
Publicar un comentario