Propone una topología de sistema híbrido con función de carga inalámbrica unidireccional y función de comunicación de datos bidireccional para el problema de reabastecimiento de energía eléctrica y transmisión de datos que enfrentan los peces robot.
propone una topología compuesta de transmisión inalámbrica de energía y datos basada en tecnología de resonancia de acoplamiento magnético para el problema de carga inalámbrica y transmisión de datos del pez robot de inspección de cables submarinos
se estudian las características del sistema de esta topología compuesta que funciona en tres modos.
se propone el método de multiplexación de tiempo compartido para la transmisión inalámbrica de energía y señales y su estrategia de cambio de modo , que resuelve el problema de la carga y comunicación inalámbrica submarina del pez robot de inspección de cables submarinos.
Empieza contando de la necesidad de energia para los barcos.
Usos de los peces robot
En el modo de transmisión de energía, la carga inalámbrica de alta eficiencia se realiza utilizando las características de transmisión de una red resonante de tipo serie-serie (SS).
En el modo de detección de alineación y comunicación de apretón de manos, el reconocimiento de la distancia de la plataforma de carga y la transmisión de la señal de apretón de manos se implementan a través de una red resonante de tipo serie-paralelo (SP) basada en el método de modulación ASK (modificación por desplazamiento de amplitud).
. En el modo de transmisión de datos de alta velocidad, la transmisión inversa (secundaria a primaria) de alta velocidad de los datos de inspección se logra a través de una red resonante de tipo SP basada en el método de modulación OFDM (multiplexación por división de frecuencia ortogonal).
Los tres modos comparten las mismas bobinas acopladas a través de una red resonante reconfigurable
 Diagrama de estructura del sistema de transmisión de datos y energía en tiempo compartido
Diagrama de estructura del sistema de transmisión de datos y energía en tiempo compartidoFuncionamiento
Se acopla a la plataforma de carga inalámbrica submarina y transmisión de datos después de la inspección del pez robot. La plataforma identifica la carga por la magnitud de la corriente de la bobina resonante y envía un comando de apretón de manos después de identificar la carga. El pez robot responde al comando y envía información sobre el estado de la batería a la plataforma. Después de que la plataforma y el pez robot se dan la mano con éxito, la plataforma los carga de forma inalámbrica y el pez robot transmite los datos de inspección al centro de monitoreo en la orilla a través de la plataforma después de que se completa la carga.
Se propone la estructura del sistema de transmisión por división de tiempo de energía y señal,
La topología principal consta de un convertidor BUCK, un inversor de puente completo, una red resonante reconfigurable acoplada, un rectificador y la carga.
El convertidor BUCK regula la potencia transferida ajustando el voltaje de entrada del inversor.
El inversor convierte el voltaje de CC en voltaje de CA de onda cuadrada de alta frecuencia y estimula la transmisión de energía inalámbrica a través de la red resonante acoplada.
Luego, el rectificador convierte el voltaje de CA inducido en voltaje de CA y lo emite para alimentar la carga.
La red resonante reconfigurable acoplada consta de una red de tipo serie-serie (SS) para transferencia de potencia (etiquetada con las líneas rojas en la Figura ),
una red de tipo serie-paralelo (SP) para detección de distancia y comunicación mediante protocolo de enlace (etiquetada con las líneas verdes en la Figura 2),
una red de tipo SP para transmisión de señales de alta velocidad (etiquetada con las líneas azules en la Figura 2), y las tres redes se pueden configurar mediante los conmutadores S5 y S6.
Tipo SS apagando S5 y S6. La potencia de carga de la batería se regula ajustando el ciclo de trabajo del interruptor de enlace BUCK Sa
La frecuencia de conmutación del enlace inversor de puente completo es la misma que la frecuencia resonante f 0 de la red resonante SS, lo que puede reducir las pérdidas de conmutación y reducir la EMI (interferencia electromagnética) en el modo de operación de conmutación suave de el inversor conmuta.
modo 2 es un modo de detección de alineación y comunicación de apretón de manos, que consiste en completar la transmisión y recepción de la señal de apretón de manos desde la plataforma de carga al pez robot, y el pez robot calcula la distancia a la plataforma reconociendo la intensidad de la señal.
La red resonante reconfigurable se configura como tipo SP apagando S5 y encendiendo S6.
Este modo utiliza modulación ASK (modificación por desplazamiento de amplitud) para transmitir datos. La transmisión de señal de primario a secundario modula la señal digital con la frecuencia de control del puente inversor f 1 (f 1>>f 0), porque la frecuencia de control del puente inversor es mucho mayor que la frecuencia de conmutación suave resonante f 0 del red resonante, el sistema opera en un estado no resonante. Por lo tanto, la potencia de transmisión se reduce considerablemente con una impedancia de bucle grande y se logra una transmisión de datos de baja potencia.
Debido a que la frecuencia de resonancia (f 0) del canal de transmisión de energía del lado secundario es mucho menor que la frecuencia de modulación primaria (f 1), el voltaje de captación no podrá cargar la batería después de la rectificación y el filtrado, por lo que el circuito resonante en serie es en estado abierto y no consume energía.
Cuando el interruptor S6 del módulo receptor de señal está cerrado, el condensador C2 y la inductancia Ls de la bobina captadora constituyen un circuito resonante paralelo, cuya frecuencia es cercana a f 1, de modo que se puede captar una tensión de señal alta.
Durante el proceso en el que el pez robot se acerca a la plataforma de carga, la amplitud de la señal captada aumenta gradualmente y el pez robot puede determinar la distancia de desplazamiento a la plataforma en función de la amplitud de la señal captada. Cuando la amplitud de la señal captada alcanza el valor máximo, indica que el pez robot está directamente encima de la plataforma de carga, y luego se puede controlar que el pez robot se estacione en ese punto. Al mismo tiempo, el circuito de demodulación de señal puede demodular el voltaje para demodular la señal de protocolo de enlace enviada por la plataforma de carga.
El pez robot puede transmitir una señal de retroalimentación a la plataforma controlando que el interruptor S6 esté encendido o apagado, y la plataforma demodula la señal de apretón de manos de la envolvente de la corriente de salida
El modo 3 es un modo de transmisión de señal de alta velocidad, que consiste en completar la transmisión de datos de inspección desde el pez robot a la plataforma de carga. La red resonante reconfigurable se configura como tipo SP activando S5 y apagando S6. Debido a que la cantidad de datos de inspección es grande, está diseñado como un canal de transmisión de señales de alta velocidad basado en el modo OFDM (multiplexación por división de frecuencia ortogonal). Los datos a transmitir se cargan en la red de transmisión resonante tipo SP compuesta por LS, C3, LP y C1 a través del módulo transmisor de modulación de señal. El lado secundario de la señal demodula los datos de inspección transmitidos a partir de la señal de voltaje de capacitancia de la red de captación tipo P (tipo paralelo)
Como se describió anteriormente, los tres modos de trabajo comparten las mismas bobinas transmisoras y receptoras acopladas Lp y Ls. El sistema funciona entre los tres modos de trabajo a través de un método de multiplexación de tiempo compartido para lograr un estacionamiento preciso, carga inalámbrica de alta eficiencia y transmisión de datos de alta velocidad .
Las ecuaciones del cirucito resonante
Explicacion mas detallada del funcionamiento de la circuiteria
200 kHz con una ganancia de −37 dB como frecuencia de comunicación

Durante la transmisión de datos, estos se cargan en la red de resonancia SP mediante modulación de alta frecuencia. Para cumplir con los requisitos de transmisión de datos a alta velocidad, la banda de comunicación de OFDM se selecciona en la banda de frecuencia de 2 a 30 MHz. La frecuencia de resonancia se establece en 10 MHz y la curva de respuesta de frecuencia del canal de transmisión de datos inverso es como se muestra en la Figura

En espera, se ajusta la carga por puente inversor en modulación AFK esperando que el robot responda

De acuerdo con el método de diseño de parámetros propuesto en [19][20]. El rendimiento de transmisión de energía y datos y varios indicadores del sistema se verifican además mediante experimentos.
El diagrama del prototipo experimental se muestra en la Figura
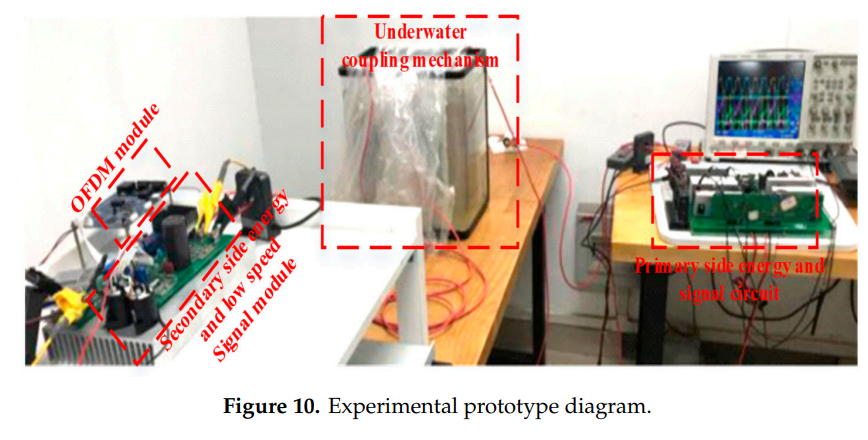
La parte de transmisión de la señal de comunicación de apretón de manos del dispositivo experimental adopta una comunicación semidúplex y realiza la modulación y demodulación en modo ASK, la frecuencia portadora de la señal transmitida es de 200 kHz. Para hacer que la frecuencia de trabajo y la frecuencia portadora de la señal del modo de transmisión de potencia estén muy alejadas entre sí, la frecuencia de trabajo de la transmisión de potencia está diseñada para ser una frecuencia de 85 kHz, lo que no solo garantiza la transmisión de potencia sino que tampoco afecta el efecto de comunicación. La transmisión de señal de alta velocidad utiliza un módulo OFDM portador de 2 a 28 MHz para la transmisión de datos de alta velocidad desde el pez robótico hasta la pila de carga.
dado que la parte de transmisión de potencia opera en el punto de frecuencia de resonancia del sistema, el sistema opera en un estado de resonancia. Al mismo tiempo, el dispositivo experimental se utilizó para probar diferentes cargas. El sistema funciona de manera estable, la potencia de transmisión alcanza los 300 W y la eficiencia es superior al 80 %, lo que satisface la demanda de carga inalámbrica del pez robot de patrullaje submarino.
el método ASK puede demodular muy bien la señal digital. En el modo de transmisión de señal de comunicación de apretón de manos, la pila de carga envía una señal de control al pez robot, la velocidad en baudios alcanza los 41 kbps y la tasa de error de la transmisión de la señal del sistema es inferior a una diezmilésima.
En aplicaciones prácticas, medidas como agregar verificación a la transmisión de señales pueden garantizar una transmisión estable y confiable de las señales del sistema, lo que puede satisfacer las necesidades reales.
El portador de datos tiene una banda de frecuencia de 2 a 28 MHz y una banda de frecuencia de 26 MHz, que contiene muchas subportadoras. La transmisión de datos se puede realizar de manera constante y la velocidad de transmisión se mantiene a 10 Mbps o más, lo que satisface la necesidad de transmisión de alta velocidad de datos de patrullaje.
No hay comentarios.:
Publicar un comentario